Cooperative, Connected and Automated Mobility (CCAM) offers the opportunity to improve traffic safety for all users and alleviate congestion. The European Union’s FRODDO Project aims to address the Operational Design Domain (ODD) issue by expanding the envelope within which a CCAM system can operate without human intervention. Frontier Innovations, in its capacity as one of the FRODDO Project Partners, examines the limitations of current CCAM system ODDs by studying both the current standards regarding Automated Driving System ODDs, as well as cutting-edge research, develops ways to predict when a CCAM system will find itself outside its ODD and thereby require human intervention, and develops behavioral models that allow CCAM to predict the actions of other road users, which enables safe and efficient interactions within a complex traffic environment.
Illustration 1 below shows how CCAM may find itself within its ODD, and thus operate without human intervention, when several conditions are met:
- Environmental conditions are favorable:
- Good lighting and weather conditions.
- Simple road environment (signage, geometry).
- Reliable connectivity with low latency.
- Traffic environments are simple:
- No or very few Vulnerable Road Users (VRUs).
- Simple intersections with favorable traffic conditions.
- There are little or no gaps in sensor coverage.
The goal is for CCAM to operate within its ODD when the above are not met, but rather find itself in a condition where:
- CCAM systems operate under as broad environmental conditions as possible.
- CCAM systems can reliably handle complex traffic environments with large numbers of other traffic agents.
- Cooperative Perception allows “filling-in” the gaps in the sensing of individual vehicles by exchanging information between vehicles (V2V), between vehicles and infrastructure (V2I), and between all stakeholders of the system (V2X).
- Cooperative Maneuvering enables safe and efficient operations.
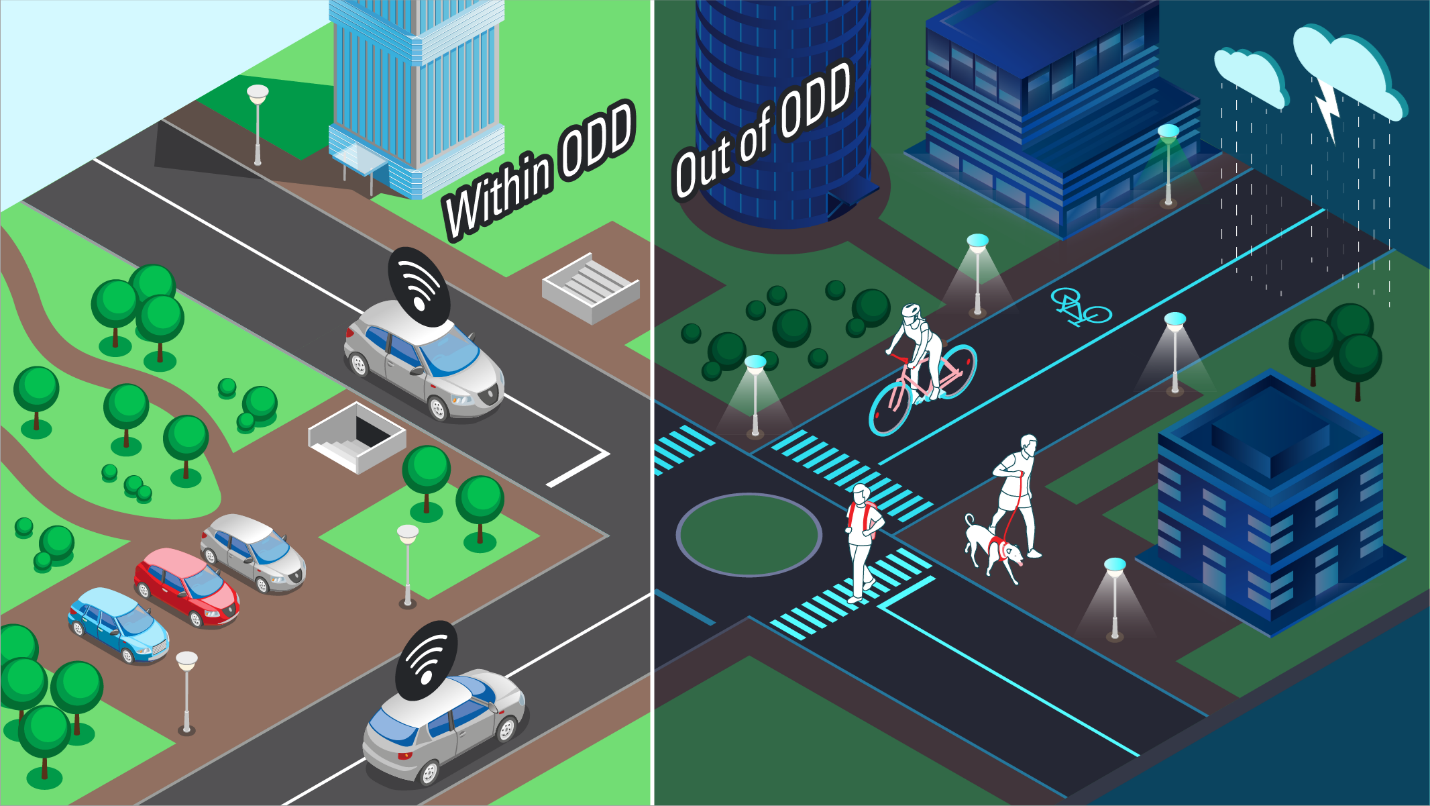
Illustration 1. Environments within and out of the ODD of a CCAM - for Illustrative Purposes Only.
Illustration 2 below provides a visual representation of the traffic agent behavioral model problem:
- CCAM needs to take into account the behavior of conventional human-driven vehicles when planning the actions of different vehicles.
- The behavior of VRUs, such as pedestrians and bicyclists, differs significantly from that of motorized vehicles and thus requires different models that may need to be tailored to local conditions and norms.
- Behavioral models need to be computationally efficient, so that they can be run in real time and inform the maneuver-planning algorithms with time to spare.
Artificial Intelligence is an obvious route to address these issues, and Frontier Innovations is developing such behavioral models.

Illustration 2. CCAM Needs to Predict the Behavior of Conventional Vehicles, and VRUs, as well as Coordinate the Actions of Participating Vehicles - for Illustrative Purposes Only.
Frontier Innovations and the other FRODDO Project partners push the boundaries of CCAM technology by applying cutting edge techniques to expand the ODD and develop behavioral algorithms that can bring CCAM closer to mainstream implementation.
Author: Konstantinos N. Christidis (FRONTIER)